Sie haben ein Projekt, suchen eine Lösung oder Idee?
Kommen Sie zu uns, wir unterstützen Sie!
Walk Engineering – Wer sind wir?
Wir sind ein Ingenieurbüro für elektronische Hardware-Entwicklung im Bereich der analogen/digitalen Steuerungs- und Leistungselektronik, Hochfrequenz und EMV sowie Netzwerk- und LED-Beleuchtungstechnik. Unser Tätigkeitsfeld umfasst drei Schwerpunkte:
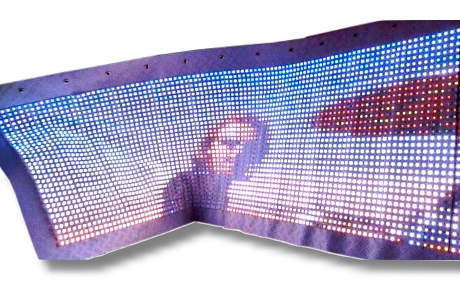
LED solutions
Entwicklung von LED-Komponenten sowie intelligenter LED-Steuerungen aller Leistungsklassen.
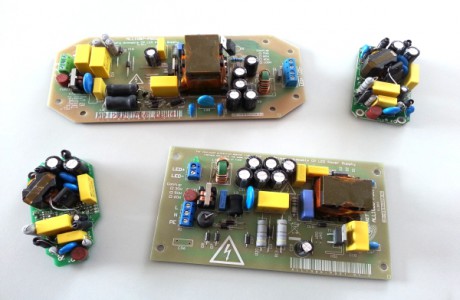
POWER solutions
Design von Elektronikkomponenten für Netz, PoE-, Batterie- und Solaranwendung sowie Unterstützung bei der Zertifikationsphase.
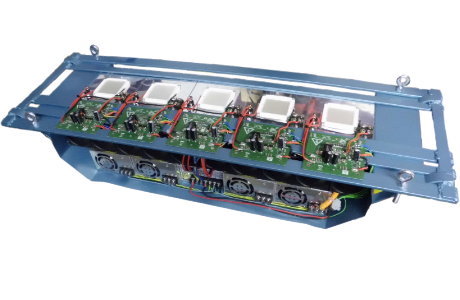
CUSTOMIZED solutions
Beratung und Lösungsfindung, Entwicklung, Prototyping bis hin zur Fertigungsbetreuung.
Walk Engineering – Was macht uns aus?
Wir verstehen uns als Ideenfinder und Löser der technischen Probleme unserer Kunden. Durch unser sehr breitbandiges know-how im analogen, digitalen, leistungsorientierten und effizienzoptimierten Schaltungsdesign sowie angrenzenden Themengebieten wie des Thermomanagements, der EMV und damit zusammenhängenden Zertifikationsprozessen, sind wir in der Lage, innovative und ganzheitliche Lösungen zu Ihrer jeweiligen Problemstellung zu finden.
Die Schlüssel zur optimalen Lösung sind für uns ein tiefes Verständnis des jeweiligen Kundenproblems und unsere langjährige Erfahrung in sehr unterschiedlichen Bereichen der Elektronik. Neben fundierter Erfahrung in der Leistungselektronik und analogen/digitalen Schaltungstechnik, in der Hochfrequenztechnik und des damit zusammenhängenden EMV-Gebietes bieten wir auch know-how aus der µC- und FPGA gestützten Hardware an. Darüberhinaus sind wir im Themengebiet der LED für Beleuchtungs- und Displayanwendung sowie deren optimalen Ansteuerung und Versorgung aktiv.
Ob im Bereich der Consumerelektronik, der Medizin-, Bühnen-, Netzwerk- oder Beleuchtungstechnik – Gemeinsam mit unseren Kunden erarbeiten wir in vertrauensvoller, unkomplizierter Zusammenarbeit maßgeschneiderte Lösungskonzepte, die meist über die erhältlichen Standardfunktionalitäten hinaus gehen. Lassen Sie sich von uns beraten!